기존 센서의 한계 극복… 온도·힘의 방향·크기까지 동시에 감지
물체를 만질 때 3차원(3D) 힘과 온도 측정이 가능한 새로운 소프트 촉각센서가 개발됐다.
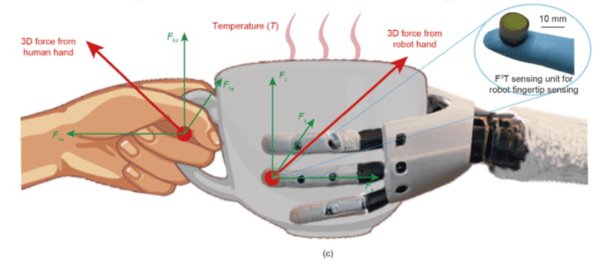
홍콩성시대(香港城市大學·City University of Hong Kong)와 홍콩과기대(Hong Kong University of Science and Technology) 공동 연구팀은 사람 피부처럼 힘(압력)과 온도를 동시에 정확하게 측정하고, 구분할 수 있는 촉각 센서인 'F³T센서'를 개발했다고 밝혔다.
연구팀에 따르면, 사람의 피부는 물체를 만졌을 때 어느 방향으로 얼마나 강하게 힘이 가해졌는지, 또 얼마나 따뜻하거나 차가운지를 잘 느낀다. 하지만 기존 로봇 촉각 센서는 이런 3가지 요소(힘의 방향, 크기, 온도)를 동시에 분리해서 정확히 측정하는 데 한계가 있다.
홍콩성시대와 홍콩과기대 연구팀이 개발한 촉각센서인 ‘F³T’는 인간 피부의 구조와 기능을 모방, 기존 센서의 문제점을 개선했다.
이 센서는 다양한 재료와 감지 원리를 통합한 4층 구조를 갖고 있다. 최상단층은 이온 젤 기반(ion gel-based) 온도 감지 필름으로 이뤄져 있다. 온도가 변하면 젤(gel) 안의 폴리머 사슬 간의 거리가 변하면서 저항이 변화하는데, 이는 독립적인 온도 측정을 가능하게 한다.
두 번째 층은 부동 마운트 다층 캐패시터(floating mount multilayer capacitor)를 갖춘 원형 동축 자기 필름으로 이뤄져 있다. 이같은 설계 방식은 모든 방향에서 '정상력(normal force)'과 '접선력(tangential force)'을 물리적으로 분리해낸다.
세 번째 층인 부동 캐패시터(floating capacitor)는 정상력에만 민감하고 접선력의 영향을 효과적으로 제거한다. 네 번째 층은 지지 및 신호 처리를 위한 경질 PCB 층이다. 센서의 내부 실리콘 엘라스토머는 인간 피부의 진피층과 유사하며, 구성 요소를 연결하고 충격력을 완화하는 역할을 한다.
F³T 센서는 온도, 정상력, 모든 방향의 접선력을 정확히 분리할 수 있다. 물체와 접촉할 때 센서가 획득하는 복합 신호는 분리된다. 이온 젤 층은 먼저 온도를 분리 및 측정하며, 부동 캐패시터는 정상력을 정확히 측정하며, 자성 필름은 접선력을 측정한다.
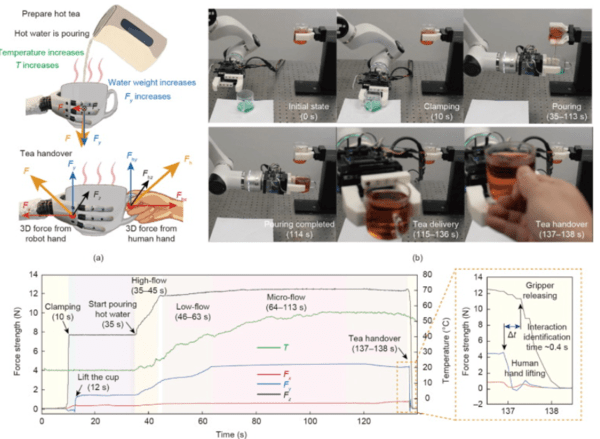
연구팀이 이 소프트 촉각 센서를 테스트한 결과 온도, 압력, 마찰력을 모두 정확하게 측정하고, 여러 자극(온도 + 압력)이 동시에 가해져도 각각을 수학적으로 분리해서 측정할수 있는 것으로 나타났다.
이번 연구 성과는 전문 저널인 ‘엔지니어링’에 발표됐다. (논문 제목:A Soft Tactile Unit with Three-Dimensional Force and Temperature Mathematical Decoupling Ability for Robots)
출처: 로봇신문 (장길수 기자)
